Oftast när vi programmerat med robotar så har vi använt robotar som rullar på hjul eftersom de är lättare att kontrollera. Men det finns många fler typer av så!
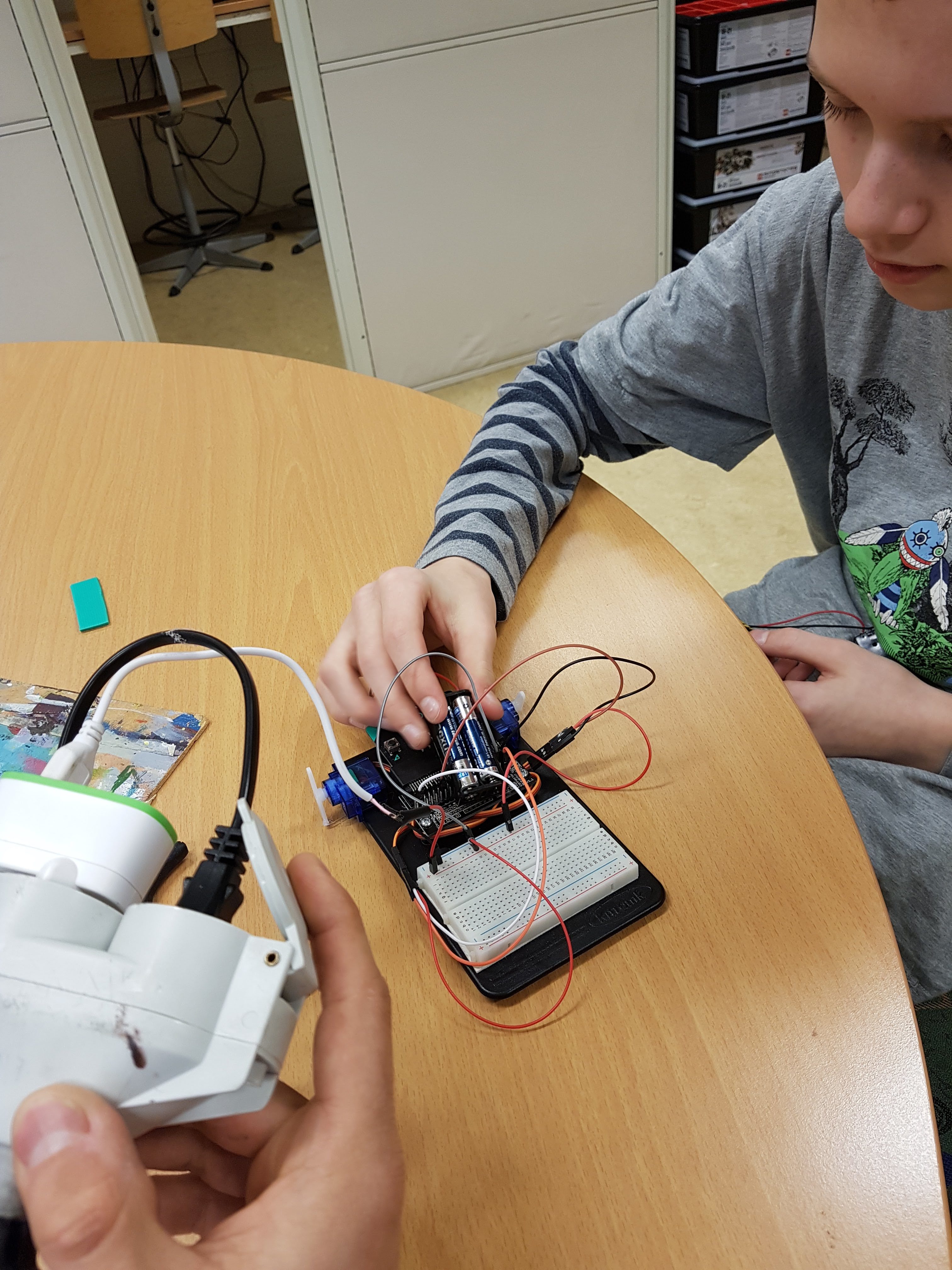
En typ av robot är en som går på ben, som vi människor. Vi gjorde ett försök att bygga en sådan i samband med att vi lärde oss om hur microbits och servomotorer fungerar. En vanlig elmotor har en axel som snurrar runt, runt, men en servomotor är annorlunda. En servo motor kan vrida sig mellan 0 till 180 grader och hur den vrider sig kan vi styra genom programmering, denna gång då programmering på en microbit. Servomotorn kopplas in till microbiten med tre kablar: en för ström, en för styrningen av motorn och en för jord. Efter att ha experimenterat med att bara styra en motor gick vi vidare med att bygga ihop en robot med två motorer och då också två ben.
Vi lärde oss flera saker under bygget. En sak var att det finns något som heter friktion, som är ett mått inom fysiken för hur väl olika saker glider mot varandra. Låg friktion betyder att det glider bra, som skridskor på is. Hög friktion betyder att det glider dåligt, som dina gympaskor på gympasalsgolvet. Vi upptäckte att för att robotens ben skulle kunna dra sig fram över bordet behöver det vara hög friktion mellan bordet och benen, så att de får grepp.
En annan sak vi lärde oss var att de servomotorer vi hade inte fungerade jättebra om de fick ström direkt från microbiten. Motorn skakade jättemycket då. Vi testade att koppla motorerna till en USB-laddare istället, vilket fungerade bättre. Nackdelen är att då krävs ett eluttag, så på sikt får vi hitta ett passande batteri istället.